My interest in cars grew when I watched a documentary about the progress and development of autonomous cars or self-driving ones. It left me wondering how humans find the drive to improve the things we have at present.
I think I found the answer to that – technology. With the presence of technology, there will always be room for innovation and development. People equip themselves with skills and knowledge to utilize technology to improve and have a better living quality.
With technology, people tend to improve everything around us, like cars. Check out below how the companies started developing autonomous cars. Learn more about how self-driving cars progress through time and the key developers who made significant progress.
- The Vision Of Autonomous Cars In The 1920s
- Materializing Bel Geddes Plan In The 1950s
- Computer-Based Improvements In The 70s And 80s
- Government-Funded Development In The New Millenium

The Vision Of Autonomous Cars In The 1920s
I find it amazing how the idea of driverless cars came about in the early 20th century. People already have a vision of how the world would progress in terms of developing technology in cars. Given that the models of cars then are not that modern and with limited access to technology, they imagined and shaped the future.

When I looked at how most records and reports say, there are attempts in the 1920s through demonstrations. Houdina Radio Control showed American Wonder, a radio-controlled vehicle that tried to navigate New York City’s busy streets from Broadway to Fifth Avenue.
The model of American Wonder is Chandler 1926, equipped with an antenna found on its tonneau. I feel like the demonstration is made for a child as the one controlling the American Wonder is in another car behind. The person just continuously sends signal impulses that control the American Wonder’s movement.
A year after, there was another demonstration made by Achen Motor. The Phantom Auto sped through the streets in Milwaukee. Besides these reports that autonomous cars started in the 1920s, there are claims that they began several centuries ago. They say that the drawing of Da Vinci of the clockwork car can be expressed as the origin of the idea.
Progress In The 1930s
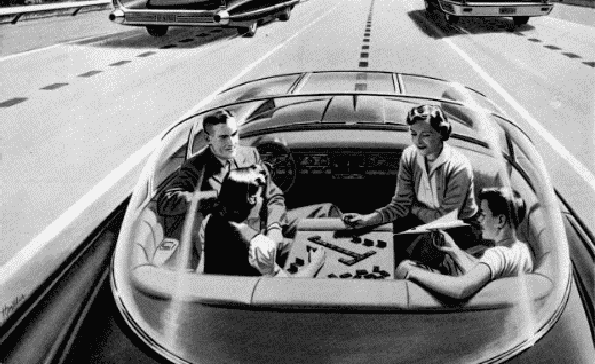
There is a significant event wherein autonomous cars are formally introduced to many. It was through an exhibit made by General Motors in 1939’s New York’s Fair in the Futurama section. I love how they already envisioned that 20 years from then, there would be an automated highway system that self-driving cars will rely on.
Although it did not materialize with their target period, I would say that it is a remarkable feat as a plan for developing the technology of cars. The man behind the exhibition is Norman Bel Geddes. He showed that cars could be propelled by electromagnetic fields found in the circuits in the roadway.
He further highlighted how we could utilize the highways to make the plan succeed. Bel Geddes provided an outline of how we can improve roadway and transportation during that time as if he already envisioned the Interstate Highway System. Still, it is said that his plans did not materialize immediately.
Materializing Bel Geddes Plan In The 1950s
After Bel Geddes presented his plan, I read that there are several attempts to materialize his vision. Of course, there are numerous failures, but there are also remarkable developments. One of them is made by the RCA Labs in 1953, but it took them four years before they try it on an actual road.
In 1953, they were able to create a miniature car guided by wires embedded on the floor. I found it a significant development as it followed Bel Geddes’ idea of controlled highways or roads for autonomous cars. RCA Labs then tested their invention in a 400-foot strip of public highway on Route 77 in Nebraska.
They embedded a series of circuits on the road alongside lights on the side of the highway. The circuit detectors are the ones sending impulses to the car to keep it running and staying in its designated lane. Moreover, I am amazed at the idea that the signals also indicate whether there are other metallic vehicles on the road.
To stick with Bel Geddes’ plan, General Motors introduced a device that relied heavily on the magnetized metal spike buried under the highways. It used a technology that utilizes the fact that the changing electromagnetic fields in the spikes guide the car in its lane.
Competition Arises In The 1960s
I think that the competition in the 1960s prompted different companies, organizations, and even educational institutions to be the first to develop fully functional autonomous cars and highway systems.
Ohio State University’s Communication and Control Systems Laboratory developed the driverless car activated by electronic devices found in the roadway. This innovation claimed that it would be ready to be installed on a large scale; thus, there was a bidding competition for installation among the four states: California, Massachusetts, New York, and Ohio.
Meanwhile, in the United Kingdom, the Transport and Road Research Laboratory tested the Citroen DS. It is by far the most significant advancement based on my inference as it interacted as it was able to run 80mph without change in direction and speed. However, funding was withdrawn based on cost-benefit analyses in the 1970s.
Computer-Based Improvements In The 70s And 80s
With the rise of computer technology, various institutions improved driverless cars in the 70s and 80. Tsukuba Mechanical Engineering Lab linked cameras to a computer, which will guide the car to a 20mph speed using image data processing. I found this astounding because it happened in 1977.

In the 1980s, there came the big names in automobiles like Mercedes Benz. I already heard about the robotic van made by the company, which apparently was designed by Ernst Dickmanns and his team at the Bundeswehr University Munich. The van recorded a speed of 39mph on a highway without traffic.
Since there is significant progress in driverless cars, EUREKA decided to fund the most extensive research and development project, around €749,000,000, called the Prometheus Project.
In the United States, the Autonomous Land-driven Vehicle (ALV) project commenced headed by the collaboration of the institutions like the University of Maryland, Carnegie Mellon University, Martin Marietta, etc. ALV used lidar, computer vision, and automatic robot control that can travel up to 19mph.
Further Improvement In The 1990s
I can say that driverless car technology improved drastically during the 1990s. In the United States, there is now national government support to fund researches on autonomous cars and highways systems in 1997. Since then, government departments and private companies work hand-in-hand to achieve the plan.
In 1995, Han Min-Hong of South Korea developed a self-driving car from Seoul to Busan. It is one of the most successful attempts during that time, but the government did not support the development as they are focused on steel and shipbuilding. Thus, it is just dubbed as a car way ahead of its time.
The same year, Carnegie Mellon University’s Navlab project completed the No Hands Across America drive wits vehicle. They covered 3,100 miles with 98.2% of autonomous driving. In the Netherlands, ParkShuttle was built as the world’s first driverless people-mover vehicle that uses magnets as artificial reference points embedded in highways.
Government-Funded Development In The New Millenium
The development of autonomous cars in the 2000s was tough to keep track of. I am confused because many private institutions, automobile companies, and even the national governments provided funding for research and development.

Regardless, the most significant progress at that time was that the government spent money on development. Like in the US, they funded Demo I to Demo III for military efforts. The Demo III showed its capacity to drive along the off-road terrain that avoids obstacles such as trees and rocks far from previous autonomous cars on the highways.
They also encouraged engineering teams to develop autonomous cars through a competition in 2004. Defense Advanced Research Projects Agency (DARPA) offered a $1 million grand prize for a team to create a vehicle that can finish a 150-mile course in the Mojave Desert.
During this time, the teams realized the importance of lidar as an integrated sensor for autonomous cars. DARPA sponsored several more competitions that led to the further improvement of driverless cars, such as integrating technology for traffic congestion sensory and many more.
Autonomous Cars Available For Public In The 2010s
I would say that the plan of Bel Geddes in the 1930s came into fruition in the 2010s, wherein most automobile companies have their version of autonomous cars, which are available for the public market. The most significant difference of the 2010s autonomous cars is they are not reliant on what is embedded on the highways.
These cars are now based on the technologies inside their system. There are software and hardware improvements on these self-driving cars, making them available and safe for public use. At present, I knew some US states are legalizing laws and policies for driverless cars.
It will be a surprise if I do not mention Tesla Motors, which becomes one of the most popular and successful companies for autonomous cars. They have models with the most advanced technology and parts for their cars, such as cameras, sensors, engines, and many more.
Conclusion
I think it is safe to say that technology leads to the continuous innovation of cars. From a vague vision of autonomous cars in the early 20th century, it has become popular as many automobile companies offer them to the public.
Undoubtedly, the future still holds further improvement of these autonomous cars, and I cannot wait to experience them.